

What are the main outputs from photogrammetry?
There are lots of useful outputs from photogrammetry, but the main outputs we’ll discuss in detail are:
- Orthomosaic;
- Digital elevation model (DEM) – both digital surface model (DSM) and digital terrain model (DTM);
- 3D model or mesh; and
- Point cloud.
Orthomosaic
An orthomosaic is a composite of images that have been stitched together by a program to form a single, larger image. Before stitching images together, distortions created in individual aerial photos are corrected. Distortions come from factors including camera tilt, lens distortion, the height of features in the image, and how far away they are from the center of the photo. Correcting these distortions creates an orthophoto – or ‘true’ photo. Consequently, all the features in an orthophoto are uniform in scale and perspective.
Many orthophotos stitched together makes an orthomosaic. The result is one large image with uniform scale throughout, making it useful in mapping applications. The image below is a component of a larger orthomosaic. Although it looks like a single photo, it is in fact made up of many images combined together.

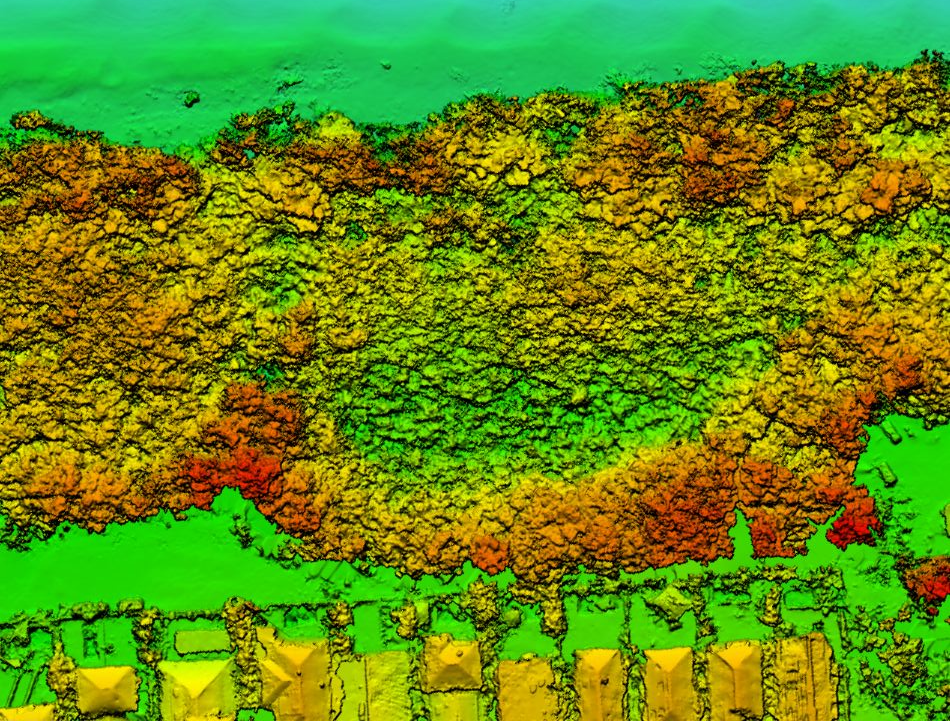 Digital Surface Model
Digital Surface Model
 Digital Terrain Model
Digital Terrain Model


