When using drones to create a map, you have different options to achieve different levels of positional accuracy. The best choice depends on your specific requirements and what equipment you have available to you.
Positional accuracy refers to how precisely a mapped location matches its true position on the Earth’s surface. In drone mapping, accuracy depends on the positioning technology used.
Standard GNSS (what we colloquially call GPS) provides meter-level accuracy (±1-3m). Drones have a standard GNSS receiver built into them.
RTK (Real-Time Kinematic) and PPK (Post-Processed Kinematic) enhance it to centimeter-level (±1-2cm) by correcting GNSS errors. You can purchase an RTK unit for the Mavic 3 Enterprise, and the Matrice 4 E comes with the RTK unit built in.
Ground Control Points (GCPs) further refine accuracy by anchoring drone imagery to known surveyed locations.
For survey-grade results, combining RTK/PPK with GCPs ensures the highest accuracy, making them crucial for industries like construction, agriculture, and land surveying.
Why would you need the highest accuracy?
When working with GNSS, RTK, and mapping, it’s important to distinguish between precision, absolute accuracy, and relative accuracy, as they impact different aspects of data quality. The choice between precision, absolute accuracy, and relative accuracy depends on your mapping goals:
Precision (consistency of measurements)
Definition: How repeatable and consistent measurements are, regardless of whether they are correct in a global sense.
Example: If you measure a point five times and the results are all within 2 cm of each other, the data is precise—even if the actual position is incorrect.
Key Point: High precision ≠ High accuracy (you can be precisely wrong!).
Absolute accuracy (true position in the real world)
Definition: How close a measured position is to its true location in a global coordinate system (e.g., WGS84, GDA2020).
Example: If a surveyor places a GCP at exactly 35.12345°S, 149.12345°E, a highly accurate system should measure it within ±1-2 cm of that true position.
Key Point: RTK, PPK, and GCPs improve absolute accuracy.
Relative accuracy (internal consistency within a dataset)
Definition: How accurately points are positioned relative to each other within the same dataset, regardless of their real-world location.
Example: If a drone map correctly measures a building’s dimensions and distances internally, but the entire map is shifted 2 meters from its true position, it has high relative accuracy but low absolute accuracy.
Key Point: Relative accuracy is enough for measurements like volume calculations but not for precise georeferencing.
So which one do I need?
High precision and absolute accuracy: Needed when your map must align with real-world coordinates, such as in land surveying, construction, legal boundary mapping, and infrastructure projects. This ensures that mapped features accurately match their true location on the Earth, enabling seamless integration with GIS, CAD models, and engineering plans.
If your project requires integration with external maps, legal compliance, or real-world navigation, then the highest accuracy is essential.
Lower precision and relative accuracy. When your map is consistent (the features are accurately positioned relative to each other) but not accurately georeferenced (not aligned accurately to real-world coordinates).
Works well when you only need measurements within your dataset (single orthomosaic) to be correct, without worrying about alignment to global coordinates. This is useful for stockpile volume and other measurements where internal consistency is more important than absolute positioning. If you are doing progress monitoring, or change detection over time then relative accuracy between the multiple datasets will be required.
Explaining the acronyms
OK, so we have introduced a few acronyms there, so let’s explain them.

GNSS
How it works
GNSS (Global Navigation Satellite System) is a global network of satellites that provide positioning, navigation, and timing (PNT) data to receivers on Earth. It includes multiple satellite constellations such as:
- GPS (United States)
- GLONASS (Russia)
- Galileo (European Union)
- BeiDou (China)
GNSS receivers, like those in drones, smartphones, and surveying equipment, use signals from multiple satellite constellations to determine precise locations anywhere on Earth. When combined with correction methods like RTK (Real-Time Kinematic) or PPK (Post-Processed Kinematic), GNSS can achieve centimeter-level accuracy, making it essential for applications like mapping, surveying, and navigation.
Accuracy
- Typically ±1 to 3m.
Limitations
- Is fast to set up.
- Absolute accuracy is low.
RTK (Real-Time Kinematic)
How it works
The drone receives GNSS signals and compares them with data from a fixed base station (like the DJI RTK 2 or 3) or an NTRIP CORS network.
The base station provides real-time correction data to the drone via UHF signal from satellite, or internet when using NTRIP.
This significantly reduces errors caused by atmospheric delays and satellite geometry.
Accuracy
- Typically ±1 to 2 cm (centimeter-level).
Limitations
- Requires a stable RTK correction signal.
- If the connection is lost, accuracy can degrade back to standard GNSS levels.


Ground Control Points (GCPs)
How it works
GCPs are temporary or semi-permanent highly visible markers that can be accurately marked when placed on the ground. Survey marks are permanently placed, highly accurate reference points. Surveyors will know if there are existing GCPs or survey marks available in the area.
These points are surveyed using high-accuracy GNSS (such as RTK or PPK).
The drone’s captured images are georeferenced using these GCPs in post-processing.
Accuracy
- ±1 to 3 cm, but depends on the accuracy of the GCP survey and the number of points used.
Limitations
- Setting up and surveying GCPs is time-consuming.
- More GCPs = higher accuracy but also more work.
NTRIP CORS (Networked Transport of RTCM via Internet Protocol – Continuously Operating Reference Stations)
How it works
Instead of a local RTK base station, the drone connects directly to an NTRIP CORS network, which consists of permanently installed base stations with highly accurate positions.
The drone receives correction data via the internet (cellular connection or Wi-Fi).
In Australia, Geoscience Australia manages the National Positioning Infrastructure providing free and open access to real-time GNSS data streams from Continuously Operating Reference Stations (CORS). Other paid services are also available like the Hexagon SmartNet.
Accuracy
- Typically ±1 to 2 cm, like RTK.
Limitations
- Requires a stable internet connection for real-time corrections.
- Coverage varies by location.

PPK (Post-Processed Kinematics)
How it works
PPK (Post-Processed Kinematics) is an alternative to RTK (Real-Time Kinematics) for achieving centimeter-level positional accuracy in drone mapping. Instead of applying real-time corrections during the flight, PPK processes the positioning data after the flight using raw GNSS data from both the drone and a base station.
Accuracy
- Typically ±1 to 2 cm, like RTK.
Advantages of PPK vs RTK
- More Reliable Than RTK – No risk of losing corrections due to RTK signal dropouts.
Works in Remote Areas – Does not require real-time connectivity to a base station. - High Accuracy – Same precision as RTK (~1–2 cm) but with more control over processing.
- Better Handling of GNSS Errors – Post-processing allows for error correction from multipath effects, atmospheric conditions, and satellite geometry.
When to use PPK
- When RTK Coverage is Unstable – PPK is ideal in areas with poor internet or radio connections.
- For Large-Scale Mapping – PPK allows uninterrupted flights, unlike RTK, which requires staying within base station range.
- For Maximum Accuracy – Since PPK post-processes the data, it can correct errors that RTK may not detect in real-time.
Limitations
- Is not done in real time.
- Time-consuming process after flight.
What is the best choice for drone mapping?
When mapping with drones, the right positioning method depends on how accurate your data needs to be. This is an ‘it depends’ question. How accurate do you need the orthomosaic? Do you need absolute or relative accuracy? Do you have access to GCPs? Have you got internet access to connect your RTK enabled drone to the CORS?
Here’s a simple breakdown of your five options:
1. Highest precision and accuracy: RTK + GCPs
Best for survey-grade mapping (±1-2 cm or potentially sub cm accuracy) where absolute accuracy is critical. RTK provides real-time corrections, while GCPs ensure accurate georeferencing.
- Set up your RTK base station over a known GCP or survey mark, or connect to an NTRIP CORS network.
- Lay out and survey GCPs using a total station or survey-grade GNSS.
- Plan and execute the drone flight with RTK corrections enabled.
- Process images with GCPs in photogrammetry software for the highest accuracy.
Perfect for cadastral surveys, infrastructure projects, and engineering applications.
2. When RTK is unavailable: GCPs only
If RTK isn’t an option, well-placed Ground Control Points (GCPs) can still provide survey-grade accuracy, though it requires extra setup and processing time.
- Place and survey five or more GCPs.
- Use a total station, survey-grade GNSS, or post-processing correction service to get accurate coordinates of each GCP.
- Fly the drone with standard GNSS (no RTK needed).
- Process images using GCPs to align the dataset.
If you don’t need absolute accuracy of your GCPs but you need relative accuracy of multiple datasets over time for change detection, then you can follow this process.
- Place out five or more markers, or use natural ground control points.
- Fly the drone with standard GNSS (no RTK needed).
- Process the data in GeoNadir and use the inspect tool to determine the latitude and longitude of the markers or natural ground control points.
- Use the same markers or natural ground control points when flying future drone mapping missions.
- Use the GeoNadir GCP Editor to ‘align’ future datasets when you upload them to GeoNadir using the known latitude and longitude for the markers or natural ground control points.
Useful when working in remote areas without RTK coverage.
3. Fast & accurate mapping: RTK only
Using RTK with a local base station or NTRIP CORS delivers centimeter-level accuracy without needing GCPs, making it ideal for efficient surveys.
- Set up an RTK base station or connect to NTRIP CORS for real-time corrections.
- Plan and fly the drone mission with RTK enabled.
- Process images directly—no GCPs needed.
Best for construction monitoring, agricultural mapping, and quick-turnaround surveys where GCPs are impractical.
4. High relative accuracy: Relative RTK
If you can’t connect to CORS or use GCPs, a local RTK base still improves relative accuracy, ensuring consistency within your dataset. It will mean that coordinates (or global accuracy) are slightly offset.
- Deploy a local RTK base station (not on a known point).
- Fly the drone with RTK corrections enabled.
- Process images normally, but be aware that absolute coordinates may be offset.
Great for volume calculations, stockpile measurements, and internal site monitoring.
5. Basic mapping: Standard GNSS
For general mapping where sub-meter accuracy is acceptable, a drone’s built-in GNSS is sufficient, though less accurate than RTK or GCP methods.
- Plan and fly the mission using the drone’s built-in GNSS.
- Process images normally, without RTK or GCPs.
Best for general visualization, environmental monitoring, and mapping where relative accuracy is sufficient and global coordinate accuracy is not required or not possible.
How to use RTK
There are three methods when using RTK
- RTK + GCPs
- RTK connected to a local base station of NTRIP CORS
- Relative RTK
Step 1: Set Up RTK connection
Option A: Using an NTRIP CORS Service
Connect the drone RTK module to an NTRIP CORS network via a mobile hotspot or a built-in LTE connection.
You do not need to set up a D-RTK base station if using this method, as the drone receives real-time correction data from the CORS station and the corrections are applied in real-time.
The RTK accuracy decreases the farther you are from a CORS station (baseline distance matters). Less than 50km is required.
This method eliminates the need for a local base station, but you must ensure your area has reliable cellular coverage.

Step 1: Set Up RTK connection
Option B: Use a Local RTK Base Station
Set up a local RTK base station like the DJI D-RTK 2.
RTK + GCPs
If the base station is placed over a pre-surveyed, known point (GCP), you can connect the base station to your drone immediately after powering it on.
The system already has accurate positioning, so there’s no need to wait for it to refine its position.
Relative RTK
If your base station is set up in a location where you are not using GCPs, it must average its position before corrections become stable.
Wait at least 5-15 minutes for a decent position or 30-60 minutes for better accuracy. The more satellites the base station connects to, the better the accuracy.
Longer observation times reduce initial positioning errors, improving relative accuracy.
In each case the drone will receive real-time corrections from the base via a radio link.
Step 2: Configure the drone
If using a DJI drone, then in DJI Pilot 2 these are going to be the general steps:
- Enable RTK positioning.
- Select Fix RTK (not Float or Single).
- Set the correction source to either NTRIP or Base Station.
- Confirm RTK Fix before flying (check in the RTK status tab).
Step 3: Plan & fly the mission
Keep these considerations in mind when flying:
- Use overlapping flight paths (e.g., 80% front overlap, 80% side overlap).
- Keep the RTK connection stable throughout the flight.
- If using a local base station, keep the drone within range. For the D-RTK this range can be up to 6km if unobstructed.
Ground Control Points (GCPs) workflow
Ground Control Points (GCPs) are precisely surveyed markers placed on the ground to improve the accuracy of drone maps and 3D models. They help align aerial imagery with real-world coordinates, ensuring high absolute accuracy—especially when drone positioning alone isn’t reliable enough.
Read this blog here to learn more about how many GCPs are required in drone mapping, and this blog here for a more detailed workflow demonstration.
Step 1: Plan GCP locations
Use 5+ well-distributed GCPs in your survey area for best results.
Considerations include:
- Corners & center of the site for even coverage.
- High-contrast targets (e.g., checkerboards, black/white crosses).
- Avoid placing GCPs near buildings, trees, or reflective surfaces to reduce GPS multipath errors. This blog here explains how to use GCPs in marine environments.
Step 2: Survey GCPs
You have different options to survey your GCPs.
- Use an RTK GPS rover or a CORS connection to accurately measure GCP positions.
- Record latitude, longitude, and elevation (in WGS84 or a local coordinate system).
- If no RTK/CORS is available, then you are going to need to log raw GNSS data in RINEX format and use a correction service to apply corrections to your GCP locations. This is done after you return to an internet connection.
Step 3: Fly the drone
Remember some of the basic rules still when collecting your drone mapping data.
- Fly with or without RTK enabled depending on if you have this capability.
- Set high overlap (80% front, 80% side) for best photogrammetry results.
- Maintain a consistent altitude. Flying lower reduces the ground sampling distance (GSD), giving you sharper imagery and more detailed models.
Step 4: Post-Processing & georeferencing
Making sure the data is located correctly at upload is the final important step.
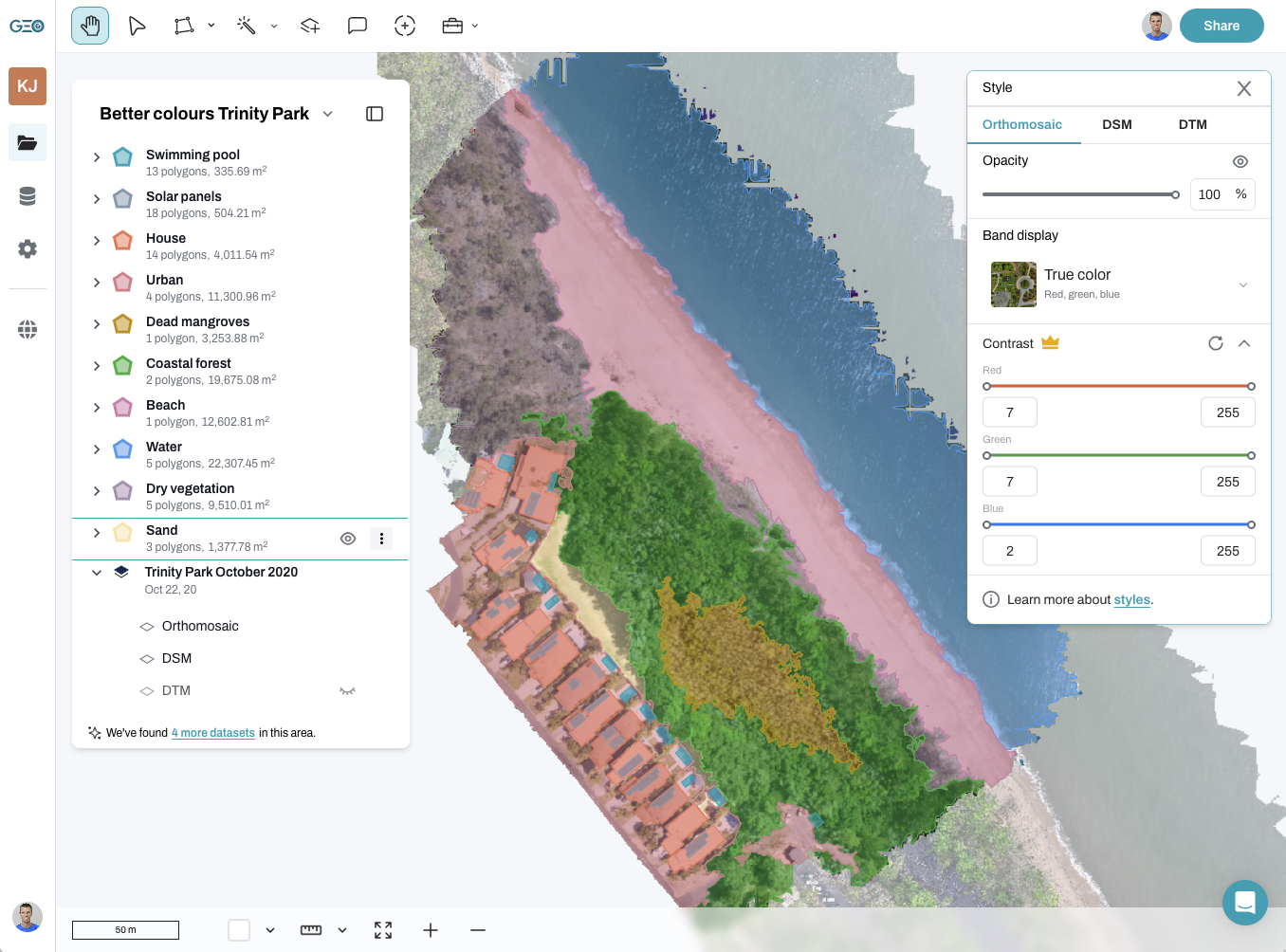
- Import images into software like GeoNadir and use the GCP Editor.
- Manually input GCP coordinates into the GCP Editor. If you have used a CORS connection then you will know the precise coordinates of each GCP, otherwise you will have to use a correction service.
- The software will adjust the dataset based on GCPs to correct any positional errors.
Accuracy comparison summary
Method | Accuracy | Pros | Cons |
|---|---|---|---|
Standard GNSS (GPS) | +/- 1m – 3m | No extra set up required | Low accuracy |
RTK (local base station) | +/- 1cm – 2cm | Real-time corrections, high accuracy | Needs RTK base, signal interruptions can occur |
Ground Control Points (GCPs) | +/- 1cm – 3cm | High accuracy in post-processing | Time-consuming setup |
NTRIP CORS (Network RTK) | +/- 1cm – 2cm | No need for a local base station | Requires stable internet |
Choosing the right positioning method for drone mapping
It’s important to understand exactly how precise your data needs to be before committing to more expensive technologies like RTK. While RTK and PPK provide exceptional accuracy, they come with significant costs in terms of equipment and setup time, which may not always be necessary. For some projects, such as volume calculations or change detection, relative accuracy might be sufficient, allowing you to save on equipment costs and time.
Ultimately, the right approach depends on your specific needs. By understanding your project’s precision requirements and budget, you can choose the best workflow and technologies to achieve the results you need without overspending.
GeoNadir supports all methods of relative and absolute accuracy for drone mapping data uploaded.
Thanks to Matt Thomas and Sean Gallagher from Aptella for their support in reviewing this blog. Aptella proudly distributes machine control and positioning systems across Australia and Southeast Asia.